Bobeau... Bobboau... I was never really sure how to spell your name. So, you're Bob-oh, now :P
Second and sadly, no I don't have a calculator. That would require me to load a model and do intersection tests. Atleast for the approximation I thought of. Bob-oh prolly could give you a solution that's more exact with
his funky Mathematica thing.The Moment of Inertia TensorSo. Moment of Inertia. No body but Bob-oh seemed sure what it was, and even he stated he didn't know how FS2's implementation worked.
I googled for "Inertia Matrix" and found physics lessons on how to calculate it. It's also called, as Bob-oh said, an Inertia Tensor.
The Inertia matrix is a 3x3 thing (Yeah, we all know that!) with a bunch of floating point numbers. A bunch of very small floating point numbers. A bunch of very small floating point numbers that are smaller for larger ships. Which doesn't make sense if we look at how to calculate even a simple MoI, let alone this tensor thing.
Time to start code browsing.
Allow me to present line 210 of physics.h :
matrix I_body_inv; // inverse moment of inertia tensor (used to calculate rotational effects)It's the inverse! This explains why the numbers are so small. Conceptually, a matrix's inverse simple. Let's say we have a 1x1 matrix A with 3 in that one cell. If B is A's inverse, notationally
B = A-1, then
A * B = I, where I is a 1x1 identity matrix, which in its single cell is the value 1. This is like scalar multiplication. If
a * b = 1, then b must equal 1/a, or a
-1.
Calculating a bigger matrix's inverse, though, is a little more difficult given how matrix multiplication works. Thankfully, there are places like Wikipedia that
already have this worked out algebraically.Why is it inversed, though? Wouldn't it be easier just to store the regular moment of inertia?
If one were finding torque from an acceleration, this would be true. In FS2, though, there's only one place where the Inertia tensor (matrix!) is used, and that's in the function physics_apply_whack() : (line 1139 of physics.cpp)
vm_vec_rotate( &delta_rotvel, &local_torque, &pi->I_body_inv );First, they use the rotate function because rotating a vector through a matrix is done the same way as getting a torque from an acceleration vector and an inertia matrix. Or, in this case, vice versa.
The syntax for vm_vec_rotate() is
vec3d *vm_vec_rotate( vec3d *dest, vec3d *src, matrix *m )For two vectors dest and src, and one matrix m,
dest = m * src; See Note one at the bottom for this expanded.
Looking back at the line in physics_apply_whack(), we see that the destination is delta_rotvel, that the source vector is torque, and that the matrix involved is pi->I_body_inv, or the Inverse of the body's inertia tensor.
In standard physics, we know that
Torque = MomentOfInertia * AngularAcceleration. But here, we see that the physics is calculating the angular acceleration (well, FS2 physics are a litte different. Dare I say... Whacked?) from an applied torque and the Inertia tensor. Or inversed inertia tensor, in this case.
Torque = MomentOfInertia * AngularAcceleration;So,
AngularAcceleration = MomentOfInertia-1 * TorqueSince this is the only place in the code that uses the Inertia tensor, it makes sense to store it inversed, as there are less calculations involved.
Calculating the TensorSo, now we know why the Moment of Inertia numbers are the way they are. How do we calculate them?
Integration is right out. When was the last time you heard a GTF Hercules function? This leaves summations.
Looking at any of the sites found on Google, we see that for
| I[x,x] I[x,y] I[x,z] |
| I[y,x] I[y,y] I[y,z] |
| I[z,x] I[z,y] I[z,z] |I[x,x] = SUM m * ( x
2 + y
2 )
I[y,y] = SUM m * ( x
2 + y
2 )
I[z,z] = SUM m * ( x
2 + y
2 )
I[x,y] = I[y,x] = SUM m * x * y
I[x,z] = I[z,x] = SUM m * x * z
I[z,y] = I[y,z] = SUM m * y * z
(Note that this is why Bob-oh said there are only six values for the Inertia tensor rather than nine.)
Now, Bob-oh had some kind of funky Mathematica thing that calculates MoIs using a model's triangles. That'd prolly be better to do, in the end, though anyone who doesn't understand what Bob-oh did won't have a chance to start just by staring at that omghax he made.
For an easier to understand approximation, which Bob-oh also alluded to, lets start with a shape and a grid. And a density, if we want to assume a uniform density for the object in question. (All the freespace ships have a density near water, if I recall what I heard correctly ;)
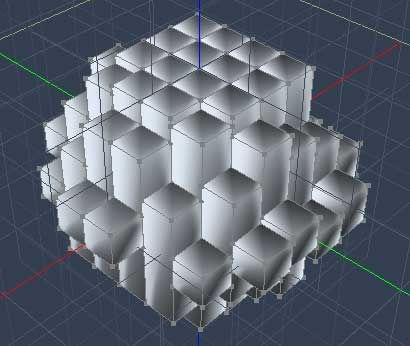
Calculating I[z,z] (SUM m * ( x
2 + y
2 )) and I[x,y] (SUM m * x * y), we make an array of boxes to approximate the shape along the Z axis, then sum the boxes' mass based on their volume (since mass = density * volume)
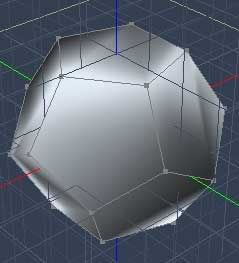
For a dodecahedron and an 8 by 8 grid, we get this extremely rough approximation by drawing boxes that meet the hedron at their centers. (Like opproximating an integral using the midpoint rule.)
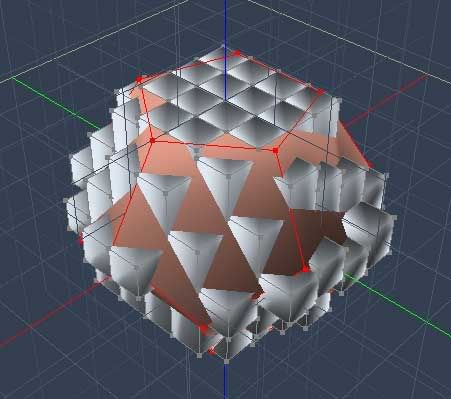
Since we know the X-Y coordinates of these boxes, we can just iterate over them, multiplying density by the volume for the mass, using their X-Y coordinates in the summation formulae.
The best part is that this also gives us an approximate volume.
This is repeated again for the X and Y axes. The volumes could optionally be averaged together.
So! Now that I've bored you all out of your brains, any questions? Comments? Corrections?
And no, again, I don't have an inertia tensor calculator. But now, Bob-oh should be able to finish his, now that he knows how FS2 treats Inertia tensors. Isn't that right, Bob-oh? ;)
And as a tangental thought, I wonder how hard it would be to change FS2 to rotate ships around their centers of mass... Either that, or change all the POFs so that the ship's model centers to their CoMs? Which would actually make for less data, even if not significantly... Though it would eliminate The Baseball Manuever as a viable defense tactic.
Notes...For two vectors dest and src, and one matrix m, dest = m * src
Expanded, this looks something like
| dest[x] | | m[x,x] m[x,y] m[x,z] | | src[x] |
| dest[y] | = | m[y,x] m[y,y] m[y,z] | x | src[y] |
| dest[z] | | m[z,x] m[z,y] m[z,z] | | src[z] |
Calculated,
| dest[x] | | m[x,x] * src[x] + m[x,y] * src[y] + m[x,z] * src[z] |
| dest[y] | = | m[y,x] * src[x] + m[y,y] * src[y] + m[y,z] * src[z] |
| dest[z] | | m[z,x] * src[x] + m[z,y] * src[y] + m[z,z] * src[z] |
